Главная
Содержание
1.
Выбор электродвигателя и кинематический расчет привода
1.1.
Выбор электродвигателя привода
1.2.
Определение частоты вращения вала электродвигателя
1.3.
Типы электродвигателей и их параметры
1.4.
Основные характеристики асинхронных электродвигателей общего применения
1. Выбор электродвигателя и кинематический расчет привода
Большинство современных
технологических машин проектируют и создают
по схеме: энергетическая машина, передаточный механизм, исполнительный орган машины,
система управления.
Устройство, состоящее
из двигателя, передаточных механизмов и системы управления для приведения в
движение машин и механизмов называется приводом.
Двигатель является одним из основных элементов привода.
От типа двигателя, его мощности, частоты вращения зависят конструктивные и
эксплуатационные характеристики рабочей машины и ее привода. Выбор
электродвигателя предусматривает определение его мощности, типа, частоты
вращения вала и основных размеров.
Тип двигателя выбирается с учетом ряда факторов, и в
том числе:
- назначения механизма или машины, для которой
проектируется данный привод;
- наличия того или иного источника энергии;
- величины потребляемой мощности;
- ограничений по массе, габаритным размерам и условиям
работы привода;
- режима работы привода и обеспечения соответствующей
механической характеристики.
Назначение машины обусловливает основные требования к
приводу, специфику его работы и характеристики. При этом учитываются мобильность,
внешняя среда, температурные условия, географические особенности и т.п.
Наличие электроэнергии предопределяет выбор
электропривода как наиболее простого и надежного.
Угловые скорости двигателя ωдв и исполнительного органа машины ωном, как правило, не
равны. Электротехническая промышленность для общемашиностроительного применения выпускает
электродвигатели с синхронной частотой
вращения пс = 3000 мин-1,
пс = 1500 мин-1, пс = 1000
мин-1 и пс = 750
мин-1. Рабочие органы технологических машин функционируют при очень большом разнообразии угловых скоростей. Для решения этих противоречий применяют
приводы. Ключевым звеном привода является
передаточный механизм, состоящий из набора механических передач, которые могут быть закрытыми
(в корпусе) и открытыми. В качестве закрытых передач наибольшее распространение
получили зубчатые (цилиндрические,
конические) и червячные передачи. В качестве открытых
- передачи с гибкой связью (ременные,
цепные) и зубчатые.
Передача, расположенная между двумя соседними валами,
называется одной ступенью привода.
Конкретный состав передач в приводе зависит в основном
от двух критериев:
1) от общего передаточного числа привода uобщ;
2) от компоновки привода, т.е. от объема заданного
пространства, в котором должен размещаться привод.
1. Исходные данные для кинематического расчета привода.
Исходными
данными для выполнения кинематического расчета служат:
-
структурная схема привода;
-
тяговое усилие Ft,
Н и скорость движения v, м/с тягового органа или вращающий момент Т, Н∙м
на приводном валу рабочего органа машинного агрегата и угловая скорость ω, рад/с
этого вала;
-
диаметр барабана D, м;
-
вид передачи (реверсивная и нереверсивная);
-
срок службы передачи.
2. Задачи кинематического расчета
привода.
2.1.
Подобрать электродвигатель.
2.2.
Определить общее передаточное число.
2.3.
Разбить передаточное число привода между ступенями.
2.4.
Определить мощность, частоту вращения и вращающий момент на каждом валу.
1.1.
Выбор электродвигателя привода
В зависимости от потребляемой мощности, а
также от ограничений по массе и размерам выбирается тот или иной тип электродвигателя.
Выбранный электродвигатель должен удовлетворять
следующим условиям:
- обеспечивать момент, достаточный для разгона
механизма с заданным ускорением, а при торможении двигателем - замедление
механизма;
- при работе в заданном режиме не должен испытывать
длительных перегрузок, ведущих к перегреву электродвигателя.
При выборе двигателя следует придерживаться следующих рекомендаций:
1. Электрические и механические параметры приводов (Рном, Uном, nном, относительная
продолжительность рабочего периода, Тпуск, Тmin, Tmax, пределы регулирования числа оборотов и т.п.) должны
соответствовать параметрам приводимых ими механизмов во всех режимах их работы
в данной установке.
2. Для механизмов, сохраняющих технологическую
непрерывность в работе, должен быть обеспечен самозапуск
их электродвигателей после кратковременных перерывов (не более 2,5 с), связанных
с перерывом питания или понижением напряжения из-за короткого замыкания, при
этом применять двигатель большей мощности, чем для непрерывной нормальной работы,
не требуется.
3. Для привода механизмов, не требующих регулирования
числа оборотов, независимо от их мощности, рекомендуется применять синхронные
или асинхронные электродвигатели с короткозамкнутым ротором.
4. Для привода механизмов, имеющих тяжелые условия пуска
или работы, либо требующих изменения числа оборотов, следует применять двигатели
с наиболее простыми и экономичными методами пуска или регулирования чисел
оборотов, возможными в данной установке.
5. Синхронные двигатели, как правило, должны иметь
устройства форсировки возбуждения или компаундирования.
Синхронные двигатели в случаях, когда они по своей мощности могут обеспечить
регулирование напряжения или режима реактивной мощности в данном узле нагрузки,
должны иметь автоматический режим включения.
6. Электродвигатели постоянного тока допускается
применять только в тех случаях, когда электродвигатели переменного тока не
обеспечивают требуемых характеристик или неэкономичны.
7. Пуск асинхронных электродвигателей с
короткозамкнутым ротором и синхронных двигателей должен производиться, как
правило, непосредственным включением в сеть (прямой пуск). При невозможности
прямого пуска следует применять пуск через трансформатор или автотрансформатор.
В особых случаях допускается пуск с подъемом частоты от нуля.
Мощность электродвигателя всегда относят к
определенному режиму работы. При проектировании привода внешние сопротивления и
режим работы являются заданными.
Различают три номинальных
режима работы двигателей:
- продолжительный,
- кратковременный,
- повторно-кратковременный.
При продолжительном
режиме работы двигатель нагревается до установившейся температуры в отличие
от кратковременного, при котором этого не происходит.
При повторно-кратковременном
режиме происходит пуск и остановка двигателя, при этом нагрев
электродвигателя и возможность реализации заданной мощности определяются
продолжительностью включения (ПВ) по относительному времени за цикл, равный 10
мин.
По величине ПВ различают четыре основных
повторно-кратковременных режима работы.
Режим работы является продолжительным (ПВ
100%), если время одного цикла работы превышает 10 мин.
При расчете мощности двигателя в
повторно-кратковременном режиме работы возможны три случая.
1.
Фактический режим работы двигателя соответствует одному из стандартных режимов;
нагрузка постоянная.
В этом случае по каталогу выбирается двигатель,
мощность которого при заданном ПВ равна требуемой.
2.
Фактическая продолжительность включения ПВф
не совпадает с номинальными значениями ПВн;
нагрузка постоянная.
В этом случае двигатель выбирается по номинальной
мощности

где Рф - фактическая мощность,
ПВн - ближайшее стандартное значение ПВ.
3. Значения
мощности Р переменны
в течение цикла.
В этом случае расчет проводится в такой
последовательности.
Строится график изменения мощности двигателя во
времени за цикл и определяется ПВф.
Определяется средняя статическая мощность за цикл
![]()
где K - коэффициент перегрузок при пуске и торможении; K=1,1-1,3;
Рi - различные значения статической мощности за соответствующие
промежутки ti времени в течение цикла продолжительностью tц.
Полученная
мощность пересчитывается по вышеприведенному выражению для определения Рн, и по
величине Рн
выбирается двигатель соответствующей мощности.
Строятся нагрузочные диаграммы механизма с
выбранным двигателем по моменту Т=Т(t) и по силе тока двигателя I=I(t), после
чего определяется средняя квадратичная сила тока
где I1,
I2,…, In
– сила тока двигателя (принимается по его характеристике за промежутки времени t1, t2,…,
tn в пределах цикла продолжительностью tц.
Для двигателей постоянного тока с параллельным
возбуждением и для асинхронных электродвигателей вместо IЭ можно определять
средний квадратический момент
Значения IЭ или ТЭ,
сравниваются с номинальными значениями силы тока Iн или момента Тн
предварительно выбранного двигателя с учетом отличия ПВф
от ПВн:


В случае несоблюдения последних неравенств двигатель непригоден по нагреву и его следует заменить
ближайшим двигателем большей мощности.
Таблица 1.1. Формулы для определения расчетной
мощности приводного двигателя
|
Расположение передач в механизме |
Заданные
параметры на рабочем
органе |
Мощность, кВт |
|
|
Последовательное: |
Рр |
|
|
|
Тр, nр |
|
||
|
Рр,
Vр |
|
||
|
Параллельное: |
от одного двигателя приводится
в движение несколько рабочих
органов |
Рр1, Рр2,
… Ррn |
|
|
Тр1, Тр2,
…Трn; nр1, nр2, …nрn |
|
||
|
Fр1, Fр2,…Fрn; Vр1, Vр2,…Vрn |
|
||
|
от нескольких двигателей
приводится в движение один рабочий
орган |
Рр |
|
|
|
Тр, nр |
|
||
|
Рр,
Vр |
|
||
|
Обозначения |
|||
|
ηм |
коэффициент
полезного действия (КПД) привода ηм=η1∙η2∙….∙ηk |
||
|
η1, η2,…., ηk |
КПД
отдельных последовательно соединенных передач привода (табл.1.2); |
||
|
Рр1, Рр2,…, Ррn |
мощность
на рабочих органах, кВт; |
||
|
Тр1, Тр2,…, Трn |
моменты
на рабочих органах, Нм; |
||
|
Рдв1, Рдв2,…, Рдвn |
расчетные
мощности двигателей, кВт; |
||
|
nр1, nр2,…, nрn |
частота
вращения рабочих органов, об/мин; |
||
|
Vр1, Vр2,…, Vрn |
линейные
скорости рабочих органов, м/с; |
||
|
Fр1, Fр2,…, Fрn |
силовая
нагрузка на рабочие органы, Н |
||
Значения КПД различных передач приведены в табл. 1.2.
Таблица 1.2. Средние значения КПД механических передач
(без учета потерь)
|
Тип передачи |
Закрытая |
Открытая |
|
Зубчатая: |
|
|
|
цилиндрическая |
0,96 … 0,97 |
0,93 … 0,95 |
|
коническая |
0,95 … 0,97 |
0,92 … 0,94 |
|
Цепная |
0,95 … 0,97 |
0,90 … 0,93 |
|
Ременная: |
|
|
|
плоским ремнем |
- |
0,96 … 0,98 |
|
клиновыми (поликлиновыми)
ремнями |
- |
0,95 … 0,97 |
|
червячная при числе заходов червяка: Z1= 1 Z1= 2 Z1= 4 |
0,70…0,75 0,80…0,85 0,80…0,95 |
|
|
муфта соединительная |
0,98 |
|
|
подшипники качения |
0,99 |
|
Примечания:
1. Ориентировочные значения КПД закрытых передач в масляной ванне приведены для
колес, выполненных по 8-й степени точности, а для открытых – по 9-й; при более
точном выполнении колес КПД может быть повышен на 1 … 1,5%; при меньшей
точности – соответственно понижен. 2. Для червячной передачи предварительное
значение КПД принимают ηчп=0,75 … 0,85. После установления основных параметров передачи
значение КПД следует уточнить. 3. Потери в подшипниках на трение оцениваются
следующими коэффициентами: для одной пары подшипников качения ηnk =0,99 … 0,995; для одной пары
подшипников скольжения ηпс= 0,98 … 0,99. 4. Потери в муфте принимаются ηмуф = 0,98. 5. В
приводах с параллельными передачами, например, с раздвоенными колёсами,
значения КПД из таблицы 1.2 учитывают только один раз.
В задании на курсовое проектирование
момент на выходном валу задан в виде графика нагрузки, который учитывает фактические
условия работы привода.
Рис.1.1
Рассмотрим в качестве примера,
приведенный на рис.1.1 график нагрузки привода.
Его следует понимать так:
- в течение суток привод работает 50%
времени, т.е. продолжительность его включения ПВ = 50%.
- в течение года привод работает 65%
времени и значит общее время работы привода за один
год составит 365 дней ∙
24 часа ∙ 0,65 ∙ 0,5=2847 часов.
За это время в пусковом
режиме двигатель работает 0,003% на моменте, который составляет 1,3 от номинала,
т.е. требуется мощность, превышающая расчётную в 1,3 раза. На расчётном моменте (на номинальной мощности
двигателя) привод работает 20% времени; на моменте 0,7 от номинала 30% времени
и на моменте 0,5 от номинала 50% времени. Анализ графика показывает, если
выбрать двигатель по номинальной мощности, то он явно будет недогружен более
чем на 50% времени работы, но одновременно он будет и перегружен во время
пусков в работу. Это учтено в конструкции серийно выпускаемых асинхронных
электродвигателей и в каталоге даётся соотношение пускового момента к номинальному, которое в нашем случае должно быть не менее
1,3. Что касается номинальной мощности, то её на первом этапе следует
подсчитать по формуле через эквивалентный момент с учётом графика нагрузки.
![]()
Для нашего конкретного случая
![]()
и требуемая эквивалентная мощность
![]()
Номинальная требуемая мощность
![]()
Подсчитав то и другое значение можно
приступать к выбору мощности электродвигателя.
Пусть, например, нам требуется выбрать мощность
двигателя ленточного транспортёра со следующими параметрами: скорость транспортёра
- 0,5м/с, усилие на ленте транспортёра - 4000Н, общее КПД привода - 0,81,
график нагрузки приведен выше.
Номинальная мощность
N=4000∙0,5/0,81=2470
Вт=2,47 кВт.
Эквивалентная мощность Nэкв=N∙0,875=2,47∙0,875=2,16 кВт.
По каталогу выпускаемых электродвигателей
исходя из номинальной мощности необходимо выбрать
двигатель мощностью 3 квт. Исходя из эквивалентной мощности
можно выбрать двигатель мощностью 2,2 квт.
Пусть нам требуется электродвигатель с
частотой вращения 1500 мин –1 (самая оптимальная частота вращения с
точки зрения экономичности и рекомендуемая в курсовом проектировании). Для
данных двигателей по каталогу отношение пускового момента к
номинальному Тп
/ Тн
= 2.
Требуемая пусковая мощность по графику
нагрузки NП=1,3∙2,47=3,21 кВт.
Серийный электродвигатель мощностью 2,2
кВт обеспечит на пуске мощность 2,2∙2=4
кВт. Таким образом, мы имеем право выбрать
двигатель мощностью 2,2 кВт, но он будет перегружен на (2,47/2,2) - 11,2% по номинальной мощности.
Продолжительность включения нашего двигателя по заданию ПВ = 50% и значит допустима перегрузка по номинальной мощности в пределах, указанных в таблице 1.3.
Таблица 1.3
|
Продолжительность включения электродвигателя,
ПВ % |
Допустимая перегрузка по номинальной мощности для асинхронных двигателей серии
АИР |
|
100% |
0% |
|
80% |
5% |
|
60% |
10% |
|
40% |
20% |
С учётом таблицы 1.3 мы окончательно
имеем право выбрать электродвигатель мощностью 2,2 кВт, хотя по расчёту
требуется мощность 2,47 кВт.
И далее в расчётах зубчатых или червячных
передач в качестве расчётного можно принимать не номинальный
вращающий момент, а эквивалентный.
1.2.
Определение частоты вращения вала электродвигателя
Требуемая частота вращения вала электродвигателя
определяется по формуле
nэд = n2 ∙ i,
где i −
передаточное отношение привода.
В дальнейших расчетах вместо передаточного отношения i = nэд / n2
применяют общее передаточное число привода uобщ
Общее передаточное число
привода
![]()
где nдв – асинхронная частота
вращения двигателя, мин-1;
nB – частота вращения
приводного вала рабочего органа, мин-1;
u1, u2 – передаточные числа элементов привода.
Частота вращения
приводного вала составляет, например,
для ленточного
транспортера:
![]()
для цепной передачи
(звездочки):
![]()
где D – диаметр барабана или
звездочки, м;
z –
число зубьев звездочки;
p – шаг
тяговой цепи, мм.
Применение u вместо i связано
только с принятой формой расчетных зависимостей для контактных напряжений,
значения которых не зависят от того, какое из зубчатых колес является ведущим.
Руководствуясь рекомендациями по выбору значений
передаточных чисел в соответствии с заданным типом передачи в редукторе (см.
табл. 1.4), определяют возможный диапазон частот вращения вала
электродвигателя
nэд = n2 ∙ (umin…umax).
По рассчитанной
мощности Р и
диапазону nэд из табл. 1.6 выбирают электродвигатель таким образом,
чтобы его номинальная мощность Pном≥P, а номинальная частота nном
вращения вала была самой близкой (из возможных вариантов) к большему значению
диапазона nэд. В этом случае размеры и стоимость электродвигателя
будут наименьшими. При этом следует иметь в виду, что большая частота вращения
вала электродвигателя при одинаковой
мощности вызывает увеличение передаточного числа редуктора, а, следовательно,
увеличение его длины и высоты. Меньшая частота вращения вызывает увеличение
размеров электродвигателя и увеличение ширины зубчатых колес, а следовательно, уменьшение размеров редуктора.
Если скоростной диапазон достаточно большой, т.е. по
скоростной характеристике можно выбрать несколько двигателей, окончательное
решение принимается с учетом следующих соображений. Быстроходные двигатели
легче и дешевле тихоходных, поэтому предпочтительнее.
Однако выбор быстроходного двигателя приводит к увеличению общего передаточного
отношения редуктора и, как правило, к увеличению его габаритов, массы и
стоимости. Если позволяет скоростной диапазон, рекомендуется выбирать два
двигателя с различной скоростной характеристикой и последующий расчет вести
параллельно. В конце расчета производится анализ вариантов по кинематическим,
технико-экономическим и другим признакам и выбирается окончательный вариант.
Одновременно необходимо учитывать рекомендуемые
значения передаточных чисел различных типов передач (табл. 1.4). Значения передаточных
чисел редуктора не должны выходить за пределы допускаемых отклонений,
предусмотренных ГОСТ 12289-76.
По выбранному электродвигателю определяют расчетное
передаточное число зубчатой передачи редуктора
![]()
Таблица 1.4. Ориентировочные знания основных параметров
одноступенчатых механических передач
|
Передачи |
Передаточное отношение umax |
КПД, η |
Передаваемая мощность Р, кВт |
Относительные габаритные размеры |
Относительная масса |
Относительная стоимость |
|
|
Зубчатые: |
|||||||
|
цилиндрические |
До 6,3 |
0,97.... |
Не ограничена |
1 |
1 |
1 |
|
|
конические |
До 6,3 |
0,95–97 |
4000 |
2 |
1,2–1 |
1,7... |
2,2 |
|
планетарные
|
3–9 |
0,95–0,97 |
5000 |
0,7–1 |
0,93–0,73 |
1,5 … |
1,25 |
|
планетарные
|
7–16 |
0,94–0,96 |
5000 |
0,8–1,1 |
0,95–0,8 |
1,6 ... |
…1,3 |
|
волновые |
80–315 |
0,7–0,9 |
150 |
0,5–0,6 |
0,05–0,15 |
1,7 … |
…1,5 |
|
Червячная при числе заходов червяка: |
|||||||
|
Z1 = 4 |
8–14 |
0,8–0,9 |
|
|
|
|
|
|
Z1 = 2 |
14–30 |
0,75–0,85 0,85 |
60 |
1–1,6 |
1,04 |
1,55 |
…1,4 |
|
Z1=1 |
30–80 |
0,7–0,8 |
|
|
|
|
|
|
Цепные |
До 10 |
0,92–0,95 |
120 |
1–1,6 |
0,25 |
0,35 |
…0,2 |
|
Ременные (трением) |
До 8 |
0,94–0,96 0,96 |
50 |
5–4 |
0,4–0,5 |
0,3 |
…0,2 |
|
Зубчато-ременные |
До 12 |
0,96–0,98 |
100 |
2,5–3 |
0,3 |
0,8 |
…0,2 |
|
Фрикционные |
До 7 |
0,85–0,95 |
20 |
1,5–2 |
1,5 |
0 |
8 |
|
Муфта соединительная |
|
0,98 |
|
|
|
|
|
|
Подшипники качения (одна пара) |
|
0,99 |
|
|
|
|
|
|
Примечания: 1. Относительные габаритные
размеры, масса и стоимость определяются по отношению к одноступенчатой
зубчатой передаче. 2. Передаточные отношения и
редукторов надо выбирать из единого ряда (допускаемое отклонение от номинального
значения и ±4%): 1, 1,12; 1,25, 1,4; 1,6,
1,8; 2; 2,24; 2,5, 2,8; 3,15, 3,55; 4, 4,5; 5; 5,6, 6,3; 7,1; 8; 9; 10; 11,2;
12,5; 14; 16; 18, 20; 22,4; 25; 28;
31,5; 35,5; 40; 45; 50; 56, 63; 71, 80;
90; 100, 112, 125; 140, 160; 180; 200; 224; 250; 280; 315, 355; |
|||||||
При окружных скоростях более 6 м/с целесообразно
применять колеса косозубые и шевронные.
Номинальные значения передаточных чисел в зубчатых
редукторах общего назначения, выполненных в виде самостоятельных агрегатов по:
1-й ряд: 1,0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0;
6,3; 8; 10; 12,5;
2-й ряд: 1,12; 1,4; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6;
7,1; 9,0;11,2.
Примечание. 1-й ряд следует предпочесть второму ряду.
Угловая скорость вала
электродвигателя
![]()
Далее можно определить
угловые скорости других валов привода
![]()
![]()
Крутящие моменты на валах определяются с учетом
потерь на трение
![]()
Крутящий момент ведомого вала
![]()
1.3.
Типы электродвигателей и их параметры
К основным типам современных
электродвигателей переменного тока относятся следующие.
Электродвигателя
единой серии
Электродвигатели трехфазного тока единой серии 4А мощностью 0,06-400 кВт с высотой оси
вращения (50-355) мм предназначаются для привода механизмов, не предъявляющих
особых требований к пусковым характеристикам, скольжению и другим качествам при
температуре окружающего воздуха от -40 °С до +40 °С.
По степени защиты они изготавливаются:
- закрытыми обдуваемыми (IP44),
- защищенными (IP23).
Электродвигатели со степенью защиты IP44 выпускаются в трех исполнениях:
- на лапах М100 (основное исполнение),
- с лапами и фланцевым щитом М200,
- с фланцевым щитом М300.
Двигатели со степенью защиты IP23 выпускаются только в основном исполнении.
Многоскоростные
электродвигатели имеют синхронные частоты вращения: 1500/3000,
750/1500, 750/1000, 500/1000, 1000/1500/3000, 750/1500/3000, 750/1000/1500,
500/750/1000/1500 об/мин.
Выпускают электродвигатели для работы от сети частотой
50 и 60 Гц.
В числе модификаций производятся:
- малошумные двигатели для работы в
приводах с повышенными требованиями к уровню шума для машин третьего
класса;
- встраиваемые электродвигатели, электродвигатели со
встроенной температурной защитой для привода механизмов;
- электродвигатели тропического, влаго-,
морозостойкого и химически стойкого исполнений.
Пример условного обозначения электродвигателя: 4АНХ315МВ4У3,
где 4 - номер серии;
А - асинхронный;
Н - защищенный (способ защиты от окружающей среды), при
отсутствии этой буквы - закрытый обдуваемый;
Х -сочетание чугуна и алюминия в качестве материалов
станины и щитов (А - станина и щиты
алюминиевые), при отсутствии букв Х и А - станины и щиты
- чугунные или стальные;
315 - высота оси вала, мм;
М - установочный размер по длине станины (либо S и L);
В - длина сердечника статора (или А) при условии сохранения установочного размера, отсутствие букв А и В означает наличие только одной длины
сердечника;
4 - число полюсов;
У3 - климатическое исполнение и категория размещения.
Электродвигатели
крановые и металлургические
Асинхронные электродвигатели трехфазного тока крановые
и металлургические с короткозамкнутым ротором серии MTKF и МТKН и с фазным ротором серий MTF и МТН (в обозначении:
М -
металлургические и крановые, Т -
трехфазного тока, F и Н - классы нагревостойкости)
предназначены для привода крановых механизмов общепромышленного назначения, а
также других механизмов с кратковременным и повторно-кратковременными режимами
работы с большими кратностями перегрузок.
Для приводов, работающих в условиях повышенных
температур окружающей среды (металлургическое производство и т.п.), рекомендуются
электродвигатели серий МТН и МТKН.
Крановые и металлургические электродвигатели обладают
повышенной нагрузочной способностью, большими пусковыми моментами, малым
временем разгона. Отношение пускового (максимального) крутящего момента к номинальному колеблется в пределах 2,3-3,2. Диапазон рабочей
температуры окружающего воздуха для крановых электродвигателей от -45 оС до +40 оС,
металлургических от -45 оС до +50 оС.
Электродвигатели имеют синхронные частоты вращения n:
1000, 750 и 600 об/мин - при работе от сети с частотой 50 Гц;
1200, 900 и 720 об/мин - при работе от сети с частотой 60 Гц.
Пример условного обозначения электродвигателя: МТКН311-8Т2,
где первая цифра трехзначного числа после буквенного
обозначения - условная величина внешнего диаметра пакета статора;
вторая цифра трехзначного числа после буквенного обозначения
- порядковый номер серии;
третья цифра трехзначного числа после буквенного
обозначения -условная длина пакета статора;
цифра, стоящая после тире - число полюсов электродвигателя.
Для работы в условиях тропиков вводится обозначение Т2, в условиях холодного климата - ХЛ2.
Электродвигатели всех габаритов изготавливают в
закрытом обдуваемом исполнении, а с фазовым ротором 5-7 габаритов, кроме того,
- в защищенном исполнении с независимой вентиляцией.
1.4.
Основные характеристики асинхронных электродвигателей общего применения
В
машиностроении применяют асинхронные электродвигатели трехфазного
тока с короткозамкнутым ротором, которые непосредственно включаются в сеть. Их преимущества:
простота конструкции, сравнительно низкая
стоимость, простота обслуживания и надежность. Недостатки: меньшие КПД и cosφ
относительно синхронных электродвигателей; ограниченная возможность регулирования
по сравнению с электродвигателями постоянного тока и асинхронными электродвигателями с фазовым
ротором, имеющих контакты для включения реостата в цепь ротора.
К основным типам асинхронных электродвигателей
трёхфазного тока, предназначенных для приводов общего применения, относят двигатели
единой серии марок:
4АН – электродвигатели, защищенные от попадания капель и
твёрдых частиц и от прикосновения к вращающимся и токоведущим частям;
4А − электродвигатели закрытые обдуваемые по ГОСТ
19523-74 (рис. 1.3). Формы исполнения: М100
− электродвигатели горизонтальные, станина на лапах (см. рис.1.3, а); М200 − то же и дополнительно с
фланцем на щите (см. рис 1.3, б);
АО2 −
электродвигатели закрытые обдуваемые по ГОСТ 13859-68 и их модификации.
Технические данные электродвигателей содержатся в
каталогах, в табл. 1.6, 1.7 приведены краткие выдержки из них.
Кроме того, форма исполнения и способ установки электродвигателя единой серии (общего
назначения) обозначаются следующим образом:
IM1081 – электродвигатели со станиной на лапах;
IM2081 – горизонтальные на
лапах и с фланцем на щите;
IM3081
– со станиной без лап и с фланцем на щите.
Пример
условного обозначения трехфазного асинхронного короткозамкнутого закрытого
обдуваемого двигателя единой серии горизонтального с чугунной станиной на
лапах, с высотой оси вращения 90 мм, с установочным размером по длине станины
L, четырех полюсного, климатического исполнения Y, категории размещения 3 по
ГОСТ 15150-69.
Двигатель исполнения IM10814АF90L4Y3
ГОСТ 19523-81.
а)
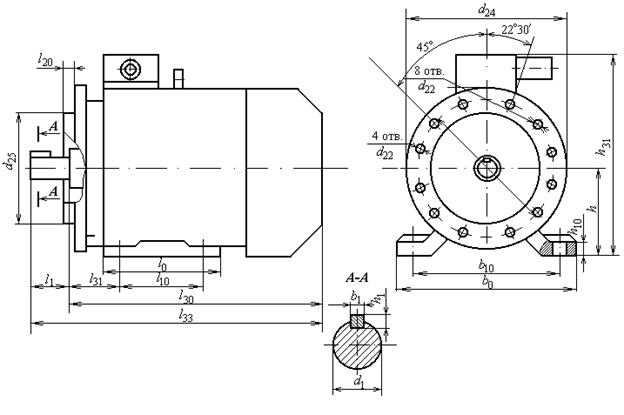
б)
Рис. 1.3
Синхронная частота вращения
соответствует холостому ходу. Под нагрузкой
частота вращения электродвигателя уменьшается.
Номинальному
(паспортному) режиму эксплуатации электродвигателя соответствует номинальная частота
nНОМ и номинальная мощность РНОМ. В этом режиме электродвигатель работает длительное время
без перегрева
и КПД близок к максимальному. Момент, соответствующий PНОМ,
является номинальным – ТНОМ.
В
каталоге указывается также отношение ТМАХ /ТНОМ, ТПУСК/TНОМ. При пуске (n = 0) двигатель развивает момент TПУСК. В процессе разгона электродвигателя
вращающий момент первоначально возрастает до TMAX (при nKP), а затем снижается
до момента TНОМ (при nНОМ). Участок характеристики от Т = 0 (холостой ход) до TМАХ близок к прямолинейному,
т.е. момент в указанных
пределах пропорционален скольжению, однако благодаря
«жесткости» механической характеристики значительное изменение нагрузки вызывает несущественное изменение
частоты вращения.
В
каталоге указывается номинальная частота вращения nНОМ, мин-1, принимаемая за
расчетную, например, при определении общего передаточного отношения механизма. Если электродвигатель
работает при установившемся режиме (nНОМ и TНОМ), а затем подвергается
перегрузке, его частота вращения
падает. При этом должно быть обеспечено даже
для кратковременного момента перегрузки
TПУСК ≤ TМАХ. Поэтому частота
вращения, соответствующая TМАХ , является критической пКР. Следовательно, при
выборе электродвигателя необходимо согласовать его
характеристику с режимом нагрузки механизма. Например, для конвейеров
указывается характер нагрузки и отношение (ТПУСК / ТНОМ)≤ (TМАХ/TНОМ).
Если это условие не соблюдается для данного типа
электродвигателя, необходимо выбрать другой тип или предусмотреть
в системе привода устройство, позволяющее разгонять
электродвигатель вхолостую, а затем плавно включать
нагрузку, например, с помощью фрикционной управляемой
муфты.
Длительный режим работы характеризуется его
продолжительностью, достаточной для того, чтобы
температура нагрева двигателя достигала установившегося
значения.
При выборе электродвигателя учитывают ряд
требований, обусловленных условиями и режимом работы
привода: частотой вращения выходного вала, состоянием
окружающей среды; типом передаточного механизма и т.д. Критериями
оценки оптимальности выбора электродвигателей служат
надежность и экономичность электромеханической системы, КПД, габариты и масса двигателя, его динамические характеристики.
В рамках учебного курсового проектирования эта
задача решается ограниченно и заключается в подборе типоразмера по каталогу с
учетом его механической характеристики.
Для определения мощности электродвигателя РЭД и частоты вращения его ротора nЭД в
техническом задании должны быть указаны мощность на выходе РВЫХ и частота вращения выходного (тихоходного) вала
привода nВЫХ. В зависимости от сложности учебной задачи указывают синхронную частоту
вращения вала электродвигателя nЭДС или проектировщик
(студент), исходя из кинематических возможностей привода, сам выбирает требуемую реальную частоту вращения ротора электродвигателя nЭДР .
Основные
параметры асинхронных короткозамкнутых электродвигателей трехфазной серии А4 приведены в табл.1.6.
При
выборе электродвигателя следует учитывать следующие положения.
Чем
ниже частота вращения вала электродвигателя, тем больше его размеры, масса и
стоимость. Высокооборотные двигатели, напротив, имеют меньшие размеры, массу,
стоимость, чем тихоходные той же мощности. Поэтому применение тихоходного
двигателя с пс = 750 мин-1
возможно при достаточном обосновании.
Следует также учитывать, что допустимая перегрузка
не должна превышать 8% при постоянной и 12% при переменной нагрузке; допустимая недогрузка - 20%.
На рис. 1.2 представлена характеристика асинхронного
электродвигателя, выражающая зависимость частоты вращения двигателя от величин
вращающего момента.
Рис. 1.2
Здесь Тном − номинальный вращающий момент;
Тнач (или Тпуск) − момент, развиваемый при
пуске двигателя;
Тmax − максимальный момент (кратковременный);
nном −
номинальная частота вращения двигателя;
nкр − критическая частота вращения
двигателя;
nс −
синхронная частота вращения двигателя (при отсутствии нагрузки), то есть
частота вращения магнитного поля, она зависит от частоты тока f и числа пар полюсов р: ![]()
Асинхронная угловая скорость, рад/сек: ![]()
При стандартной частоте f = 50 1/c и числе пар полюсов
р от 1 до 4 синхронная частота вращения двигателя nс = 3000, 1500, 1000, 750 об/мин.
Частота вращения nном, указываемая в каталогах
электродвигателей, относится к номинальному режиму, её и принимают во внимание
при определении общего передаточного отношения привода.
Под действием нагрузки частота вращения вала
электродвигателя nэд уменьшается по сравнению с nс, возникает скольжение s, определяемое по формуле s = (nс – nэд)
/ nс. Следовательно, nэд = nс ∙ (1 – s).
Большинство технологических машин, следовательно, и
их приводы работают в условиях переменных режимов нагружения, которые определяются циклограммой, т.е.
графиком изменения вращающего момента во времени.
Исследованием установлено, что при всем многообразии
циклограмм моментов их можно приближенно свести к шести
стандартным типовым режимам нагружения.
0 — постоянный режим нагружения, характерен для машин, которые работают с отклонениями
от номинального режима до 20%. Он является наиболее тяжелым.
1-й — тяжёлый режим нагружения, характерен для машин, которые работают большую
часть времени с нагрузками, близкими к номинальным,
например, для горных машин.
11 — средний равновероятный
режим нагружения,
характерен для машин, которые работают одинаковое время со всеми значениями
нагрузки, например, для транспортных машин.
111 — средний нормальный режим нагружения, характерен для машин, которые работают большую часть времени со средними нагрузками,
например, для достаточно интенсивно эксплуатируемых машин.
1V — лёгкий режим нагружения, характерен для машин, которые работают большую часть времени с нагрузками ниже средних, например, для широко универсальных станков.
V — особо лёгкий режим нагружения, характерен для машин, которые большую часть
времени работают с малыми нагрузками, например, для металлорежущих станков.
Сведения о режимах наружения
используют при проектировании зубчатых передач на выносливость согласно табл.
1.5.
Таблица 1.5. Коэффициенты
для вычисления эквивалентного числа циклов
|
Номер режима |
KHE |
KFE* |
|
0 1 2 3 4 5 |
1 0,500 0,250 0,180 0,125 0,063 |
1 0,300/0,200 0,143/0,100 0,065/0,036 0,038/0,016 0,013/0,004 |
|
*Числитель для зубчатых колес с однородной
структурой, включая ТВЧ со сквозной закалкой, и для шлифованной переходной
поверхности независимо от твёрдости. Знаменатель для зубчатых колёс
азотированных, цементированных и нитроцементированных
с нешлифованной переходной поверхностью. |
||
Таблица 1.6. Двигатели асинхронные короткозамкнутые трёхфазные
серии 4А общепромышленного применения;
закрытые обдуваемые. Технические данные
|
Номинальная мощность Рэ,
кВт |
Синхронная частота вращения, мин-1 |
|||||||
|
3000 |
1500 |
1000 |
750 |
|||||
|
Тип двигателя, 4А |
nэ (d)э |
Тип двигателя, 4А |
nэ (d)э |
Тип двигателя, 4А |
nэ (d)э |
Тип двигателя, 4А |
nэ (d)э |
|
|
0,25 0,37 0,55 0,75 1,1 1,5 2,2 3,0 4,0 5,5 7,5 11,0 15,0 |
АМ56В2У3 АМ63А2У3 АМ63В2У3 М71А2У3 М71В2У3 М80А2У3 М80В2У3 М90L2У3 М100S2У3 М100L2У3 М112M2У3 М132M2У3 М160S2У3 |
2760(11) 2740(14) 2710(14) 2840(19) 2810(19) 2850(22) 2850(22) 2840(24) 2880(28) 2880(28) 2900(32) 2930(36) 2930(42) |
АМ63А4У3 АМ63В4У3 М471А4У3 М71В4У3 М80А4У3 М80В4У3 М90L4У3 М100S4У3 М100L4У3 М112М4У3 М132S4У3 М1М2М4У3 М160S4У3 |
1370(14) 1365(14) 1390(19) 1390(19) 1420(19) 1415(22) 1425(22) 1435(24) 1430(28) 1445(28) 1455(32) 1450(36) 1460(42) |
АМ63В6У3 М71А6У3 М71В6У3 М80А6У3 М80В6У3 М90L6У3 М100L6У3 М112MА6У3 М112MB6У3 М132S6У3 М132M6У3 М160S6У3 М160M6У3 |
890(14) 910(19) 900(19) 915(22) 920(22) 935(24) 950(28) 955(32) 950(32) 965(36) 970(36) 970(42) 970(42) |
M71B8У3 М80А8У3 М80В8У3 М90LA8У3 М90LВ8У3 М100L8У3 М112МА8У3 М112МВ8У3 М132S8У3 М132М8У3 М160S8У3 М160М8У3 М180М8У3 |
680(19) 675(22) 700(22) 700(24) 700(24) 700(28) 700(32) 700(32) 720(36) 720(36) 730(42) 730(42) 730(42) |
|
Примечание: Структура обозначения типоразмера двигателя
(расшифровывается слева направо): 4
− порядковый номер серии; А
− вид двигателя − асинхронный; А
− станина и щиты двигателя алюминиевые (отсутствие знака означает, что
станина и щиты чугунные или стальные); М
− модернизированный; двух- или трёхзначное
число − высота оси вращения ротора; А,
В − длина сердечника
статора; K, L, M, S
− установочный размер по длине станины;
2,
4, 6, 8 − число полюсов; У3
− климатическое исполнение и категория размещения (для работы в зонах с
умеренным климатом) по ГОСТ 15150-69. |
||||||||
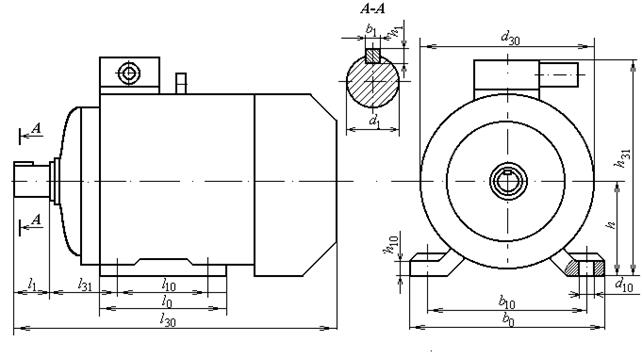
Таблица 1.7.
Двигатели. Основные размеры, мм
|
Тип двигателя |
Число полюсов |
Исполнение |
||||||||||||||||||
|
IM1081 |
IM1081, |
IM1081, |
IM2081, |
|||||||||||||||||
|
d30 |
l1 |
l30 |
d1 |
b1 |
h1 |
l30 |
l31 |
d10 |
b10 |
h |
h10 |
h31 |
l20 |
l21 |
d20 |
d22 |
d24 |
d25 |
||
|
71А, В |
2, 4, 6, 8 |
170 |
40 |
285 |
19 |
6 |
6 |
90 |
45 |
7 |
112 |
71 |
9 |
201 |
3,5 |
10 |
165 |
12 |
200 |
130 |
|
80А |
186 |
|
300 |
22 |
100 |
50 |
10 |
125 |
80 |
10 |
218 |
|
|
|||||||
|
80В |
320 |
|||||||||||||||||||
|
90L |
208 |
|
350 |
24 |
8 |
7 |
125 |
56 |
140 |
90 |
11 |
243 |
4 |
12 |
215 |
15 |
250 |
180 |
||
|
100S |
235 |
60 |
362 |
28 |
112 |
63 |
12 |
160 |
100 |
12 |
263 |
14 |
||||||||
|
100L |
392 |
140 |
||||||||||||||||||
|
112М |
260 |
80 |
452 |
32 |
10 |
8 |
70 |
190 |
112 |
310 |
18 |
265 |
300 |
230 |
||||||
|
132S |
302 |
480 |
38 |
89 |
216 |
132 |
13 |
350 |
5 |
18 |
300 |
19 |
350 |
250 |
||||||
|
132М |
530 |
178 |
||||||||||||||||||
|
160S |
2 |
358 |
110 |
624 |
42 |
12 |
108 |
15 |
254 |
160 |
18 |
430 |
15 |
|||||||
|
4, 6, 8 |
48 |
14 |
9 |
|||||||||||||||||
|
160М |
2 |
667 |
42 |
12 |
8 |
210 |
||||||||||||||
|
4, 6, 8 |
48 |
14 |
9 |
|||||||||||||||||
|
180S |
2 |
410 |
662 |
48 |
14 |
9 |
203 |
121 |
279 |
180 |
20 |
470 |
18 |
350 |
400 |
300 |
||||
|
4, 6, 8 |
55 |
16 |
10 |
|||||||||||||||||
|
180М |
2 |
702 |
48 |
14 |
9 |
241 |
||||||||||||||
|
4, 6, 8 |
55 |
16 |
10 |
|||||||||||||||||
Таблица 1.8.
Мощности и скорости вращения двигателей А2, АО2, и
АОЛ2
|
Тип электродвигателя |
Номинальная мощность, кВт |
Частота вращения, мин-1 |
Тип электродвигателя |
Номинальная мощность, кВт |
Частота вращения, мин-1 |
Тип электродвигателя |
Номинальная мощность, кВт |
Частота вращения, мин-1 |
|
АОЛ2-11-12 |
0,8 |
2830 |
АО2-51-2 |
10 |
2920 |
АО2-72-4 |
30 |
1460 |
|
АОЛ1-12-2 |
1,3 |
2830 |
АО2-52-2 |
13 |
2920 |
АО2-71-6 |
17 |
970 |
|
АОЛ2-11-4 |
1,6 |
1350 |
АО2-51-4 |
7,5 |
1460 |
АО2-72-6 |
22 |
970 |
|
АОЛ2-12-4 |
0,8 |
1350 |
АО2-52-4 |
10 |
1460 |
АО2-71-8 |
13 |
730 |
|
АОЛ2-11-6 |
0,4 |
910 |
АО2-51-6 |
5,5 |
970 |
АО2-72-8 |
17 |
730 |
|
АОЛ2-12-6 |
0,6 |
910 |
АО2-52-6 |
7,5 |
970 |
АО2-81-2 |
40 |
2940 |
|
АОЛ2-21-2 |
1,5 |
2860 |
АО2-51-8 |
4,0 |
730 |
АО2-82-2 |
55 |
2940 |
|
АОЛ2-22-2 |
2,2 |
2860 |
АО2-52-8 |
5,5 |
730 |
АО2-81-4 |
40 |
1460 |
|
АОЛ2-21-4 |
1,1 |
1400 |
АО2-62-2 |
17 |
2890 |
АО2-82-4 |
55 |
1460 |
|
АОЛ2-22-4 |
1,5 |
1420 |
АО2-61-4 |
13 |
1460 |
АО2-84-6 |
30 |
980 |
|
АОЛ2-21-6 |
0,8 |
930 |
АО2-62-4 |
17 |
1450 |
АО2-82-6 |
40 |
980 |
|
АОЛ2-22-6 |
1,1 |
930 |
АО2-61-6 |
10 |
970 |
АО2-81-8 |
22 |
735 |
|
АОЛ2-31-2 |
3,0 |
2880 |
АО2-62-6 |
13 |
960 |
АО2-82-8 |
30 |
735 |
|
АОЛ2-32-2 |
4,0 |
2880 |
АО2-61-8 |
7,5 |
725 |
АО2-81-10 |
17 |
585 |
|
АОЛ2-31-4 |
2,2 |
1430 |
АО2-62-8 |
10 |
725 |
АО2-82-10 |
22 |
585 |
|
АОЛ2-32-4 |
3,0 |
1430 |
А2-71-2 |
30 |
2900 |
АО2-91-2 |
75 |
2960 |
|
АОЛ2-31-6 |
1,5 |
950 |
А2-72-2 |
40 |
2900 |
АО2-92-2 |
100 |
2960 |
|
АОЛ2-32-6 |
2,2 |
950 |
А2-71-4 |
22 |
1460 |
АО2-91-4 |
75 |
1470 |
|
АО2-41-2 |
5,5 |
2910 |
А2-72-4 |
30 |
1460 |
АО2-92-4 |
100 |
1470 |
|
АО2-42-2 |
7,5 |
2910 |
А2-71-6 |
17 |
970 |
АО2-91-6 |
55 |
980 |
|
АО2-41-4 |
4,0 |
1440 |
А2-72-6 |
22 |
970 |
АО2-92-6 |
75 |
980 |
|
АО2-42-4 |
5,5 |
1450 |
А2-71-8 |
13 |
730 |
АО2-91-8 |
50 |
740 |
|
АО2-41-6 |
3,0 |
960 |
А2-72-8 |
17 |
730 |
АО2-92-8 |
55 |
740 |
|
АО2-42-6 |
4,0 |
955 |
АО2-71-2 |
22 |
2900 |
АО2-91-10 |
30 |
585 |
|
АО2-41-8 |
2,2 |
720 |
АО2-72-2 |
30 |
2900 |
АО2-92-10 |
40 |
585 |
|
АО2-42-8 |
3,0 |
720 |
АО2-71-4 |
22 |
1460 |
|
|
|
|
Примечание:
Число после первого тире обозначает типоразмер, в котором первая цифра –
порядковый номер наружного диаметра сердечника статора, вторая цифра –
порядковый номер длины двигателя; цифра после второго тире – число полюсов. |
||||||||
Таблица 1.9.
Основные стандарты по электродвигателям
|
Стандарт |
Наименование |
|
ГОСТ 9630-80 Е |
Двигатели трехфазные
асинхронные напряжением свыше 1000 В. Общие технические условия |
|
ГОСТ 12049-75 |
Двигатели постоянного тока
для машин напольного безрельсового электрифицированного транспорта. Общие
технические условия |
|
ГОСТ 14191-88 Е |
Машины электрические
вращающиеся малой мощности. Двигатели для звукозаписывающей аппаратуры и
электропроигрывающих устройств назначения |
|
ГОСТ 16264.0-85Е |
Машины электрические малой
мощности. Двигатели. Общие технические условия |
|
ГОСТ 16264.1-85 |
Двигатели асинхронные.
Общие технические условия |
|
ГОСТ 16264.2-85 |
Двигатели синхронные. Общие
технические условия |
|
ГОСТ 16264.3-85 |
Двигатели коллекторные.
Общие технические условия |
|
ГОСТ 16264.4-85 |
Двигатели постоянного тока
бесконтактные. Общие технические условия |
|
ГОСТ 16264.5-85 |
Двигатели шаговые. Общие
технические условия |
|
ГОСТ 18058-80 |
Двигатели трехфазные
асинхронные короткозамкнутые погружные серии ПЭД. Технические условия |
|
ГОСТ 18200-90 Е |
Машины электрические
вращающиеся крупице свыше 200 кВт. Двигатели синхронные. Общие технические
условия |
|
ГОСТ 24915-81 |
Двигатели трехфазные
асинхронные напряжением 6000 В, мощностью от 200 до
1000 кВт. Ряды мощностей и установочных размеров |
|
ГОСТ 26771-85 |
Микроэлектродвигатели для
игрушек. Общие технические условия |
В качестве муфт, служащих для
соединения валов, в приводах использовать следующие:
а) упругие:
втулочно-пальцевые, с торообразной оболочкой;
б) компенсирующие: зубчатая, кулочково
- дисковая.
Одним из основных узлов привода является редуктор,
состоящий из одной или нескольких передач, заключенных в закрытый корпус.
Редуктор служит для понижения угловой скорости и
увеличения вращающего момента на выходном валу.
Пример 1.
Произвести кинематический расчет привода, показанного
на рис.1.4, при следующих данных: диаметр барабана D =
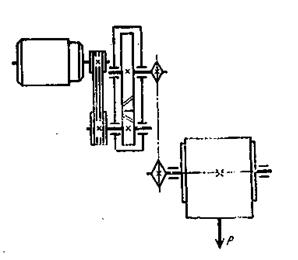
Рис. 1.4.
Кинематическая схема привода ленточного транспортера
Решение.
Принимаем КПД передач (табл. 1.2), показанных на рис.
1.4:
ременной передачи η1=
0,98;
зубчатой пары η2= 0,98;
цепной передачи η3= 0,96;
потери в опорах трех валов ![]() = 0,993.
= 0,993.
КПД всего привода
![]()
Требуемая мощность электродвигателя
![]()
Частота вращения вала барабана
![]()
Из таблицы 1.6 выбираем ближайшие по мощности
электродвигатели с повышенным пусковым моментом:
АО2-42-6, имеющий N = 4 кВт и n = 955 об/мин, и
АО2-41-4, у которого N
= 4 Квт и n = 1440 об/мин.
Определяем передаточные отношения привода:
в первом случае
![]()
во втором
![]()
Приемлемы оба типа двигателя; в первом варианте
передаточное отношение может быть реализовано, например, так: по таблице 1.3
выбираем для ременной передачи i1 = 2;
для редуктора i2 = 4
и для цепной передачи i3 = 4.
Общее i = i1∙i1∙i1 =2∙4∙4=32. Отклонение от заданного
составит ![]() (допускается отклонение
до ±3%).
(допускается отклонение
до ±3%).
Пример 2.
Выбрать электродвигатель к кормоприготовительной
машине (рис. 1.5), выполнить
кинематический расчет и определить моменты вращения на валах при следующих
исходных данных: мощность на рабочем валу машины Р = 1,5 кВт, частота вращения рабочего вала пр
= 30 мин-1, синхронная частота вращения вала электродвигателя
nсэд =
3000 мин-1, режим нагружения — 5 (легкий).
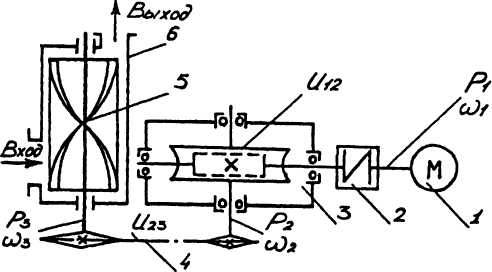
Рис. 1.5
Кинематическая схема привода:
1 — электродвигатель, 2
— муфта упругая; 3 — червячный редуктор;
4 —
цепная передача; 5 — рабочий вал со спиральными лопастями; 6 —
чан
Решение.
1. Определяем предварительное значение КПД
привода.
![]()
Значения η отдельных звеньев приняты по табл. 1.2; КПД червячной передачи
(при двухзаходном
червяке) η12 =
0,78; КПД цепной передачи η23 =
0,94; КПД муфты ηм = 0,98; КПД одной пары подшипников ηп = 0,99 (в нашем случае — три пары).
2. Определяем требуемую мощность на ведущем
валу привода Р’:
P’=P /𝜂об
= 1,5 / 0,71 = 2,1 кВт.
При заданном режиме нагрузки механизма
принимаем по табл. 1.6, исходя из заданной синхронной частоты вращения (nсэд = 3000 мин-1), электродвигатель
серии A4
типа М80В2У3 с номинальной мощностью Pэд =
2,2 кВт, асинхронной частотой вращения вала
nНОМ =
2850 мин-1; диаметр выступающего конца вала d1
=
3. Определяем общее
передаточное число привода и разбиваем его по ступеням:
uоб = nном / np=2850/30 = 95
Так как uоб = и12∙ u23, редуктор должен иметь стандартное передаточное значение (ГОСТ 2144–76), а
привод в целом — компактные размеры, принимаем (табл. 1.10) u12 = 28, тогда передаточное число
цепной передачи:
u23 =uоб/u12 = 94/28 = 3,36.
Таблица 1.10. Стандартные значения
передаточных чисел червячных передач
|
1-й ряд |
10 |
12,5 |
16 |
20 |
25 |
31,5 |
40 |
50 |
63 |
|
2-й ряд |
- |
- |
- |
140 |
180 |
225 |
280 |
355 |
71 |
|
Примечание: 1-й ряд следует предпочитать 2-му |
|||||||||
4. Определяем частоты вращения (угловые скорости) валов привода:
n1 =nном
=
2850
мин-1;
ω1
= πn1
/ 30 =3,14∙2850/30
= 298,3 c-1;
n2 =n1 / и12 = 2850/20 =142,5 мин-1; ω2 =πn2/30=3,14∙100,7/30=10,54 c-1;
n3
=n2/и23=100,7/3,36 = 29,97 мин-1;
ω3 =πn3/30=3,14∙29,97/30=3,14 c-1.
5. Определяем моменты вращения на валах
T1 =P1/ ω1= 2,1∙103/ 298,3 = 7,04 Н∙м;
P2 = P1∙ ηм∙ η12∙![]() =2,1∙0,98∙ 0,78 ∙ 0,992 = 1,57 кВт;
=2,1∙0,98∙ 0,78 ∙ 0,992 = 1,57 кВт;
T2 = Р2 / ω2 =1,57∙103/10,5 = 149,52 Н∙м;
Т3 = Р3
/ ω3 =2,1∙103/3,13 = 668,79 Н∙м.
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Теоретическая механика Сопротивление материалов
Строительная механика Детали машин Теория машин и механизмов